news


Powering Ahead: A Comprehensive Look at How Motorized Traction Wheels Work
This article explores the design, operation, and practical applications of motorized traction wheels.
Revolutionizing the Food and Beverage Industry: Exploring New Robots in Food Preparation, Serving, and Delivery
Robotic advancements are dramatically reshaping the landscape of the food and beverage sector. This article delves into the transformative impact of robots on aspects of the industry, including food preparation, service, and delivery logistics.
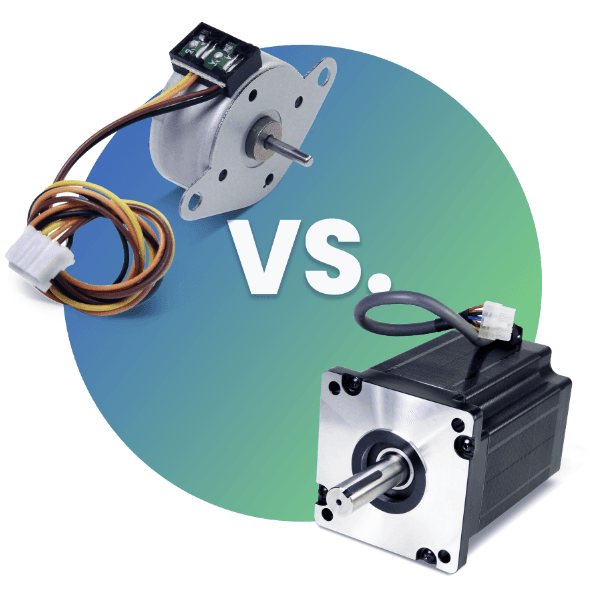
Choosing the Right Stepper Motor: PM Stepper or Hybrid Stepper?
When it comes to selecting the right stepper motor for your application, there are two primary types to consider: permanent magnet (PM) stepper motors and hybrid stepper motors. Both types have their advantages and disadvantages, and the choice ultimately depends on your specific application requirements.

Surgical Robot Stepper Motor Case Study
When selecting a stepper motor for an application in the medical industry, many factors need to be considered. These applications, whether they are pumps, life science-related, or general lab automation, are often used in environments that are crucial to patients and technicians alike. In this case study, we will take a sneak peek into an application involving surgical robotics!
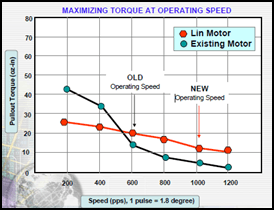
The Influence of Operating Speed on Stepper Motor Selection
Frequently, when it comes to step motor selection, users will select a motor with the highest holding torque rating, assuming that it will give them optimal performance. However, it is an improper practice to choose a motor based on holding torque alone. In fact, the step motor with the highest holding torque in many situations can prove to be a poor choice, especially when trying to maximize torque at desired operating speed.

Stepper Motor Selection and Sizing
Selecting the right motor for an application can be difficult as each motor has different characteristics and will provide different torque and speeds. When trying to find the right motor and size it's important to keep in mind the application the motor will be used for as well as the power you can provide to the motor.

Foam Densifier Reduces Lin Engineering's Environmental Footprint
Lin Engineering uses a Foam Densifier to recycle foam and to help reduce our environmental footprint. This machine has helped reduce our overall waste by up to 75%.

Advantages of Servo BLDC Motors in Automated Guided Vehicles
Autonomous Vehicles and Robots are able to navigate on their own allowing them to transport goods from one location to the next on their own. Engineers typically use Servo motors to drive AGVs as they deliver precise speed control as well as position control. But what are servo motors and what makes them good for AGVs?

Utilizing Frameless BLDC Motors for Electromagnetic Resistance in Next Generation of Smart Home Gym Equipment
The new generation of smart home gym equipment utilizes BLDC motors such as our frameless motors to provide electromagnetic resistance. Such gym equipment often needs to be as light and compact as possible while still offering a full and complete workout. Frameless motors are ideal for this application because they eliminate wasted space and redundancy by design.