
Z417 SeriesHybrid Stepper Motor
- Signature Series Technology for ultimate smooth motion and high accuracy
- High Step Accuracy
- Virtually Zero Detent Torque
- NEMA 17 (1.650 in) Frame Size
- 0.9° Step Angle
- 1.1 to 1.7 in Length
- 11.33 to 28.32 oz-in Holding Torque
Models
| Model # | NEMA size | Frame size | Step Angle | Connection Type | Length, in | Current AMP | Holding Torque, oz-in | Resistance | Inertia, oz-in² | Weight, lbs | # of Leads | Availability | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 | Z417-11-03 | NEMA 17 | 1.650 in | 0.9° | bipolar | 1.100 in | 1.2 AMP | 11.33 oz-in | 2.95 | 0.07 oz-in² | 0.311 lbs | 4 | Legacy |
| Z417-11-06 | NEMA 17 | 1.650 in | 0.9° | bipolar | 1.100 in | 0.8 AMP | 11.33 oz-in | 7.39 | 0.07 oz-in² | 0.311 lbs | 4 | Legacy |
| Z417-11-09 | NEMA 17 | 1.650 in | 0.9° | bipolar | 1.100 in | 0.8 AMP | 11.33 oz-in | 10.21 | 0.07 oz-in² | 0.311 lbs | 4 | Legacy |
| Z417-11-18 | NEMA 17 | 1.650 in | 0.9° | bipolar | 1.100 in | 0.8 AMP | 11.33 oz-in | 10 | 0.07 oz-in² | 0.311 lbs | 4 | Legacy |
| Z417-17-01 | NEMA 17 | 1.650 in | 0.9° | bipolar | 1.700 in | 0.5 AMP | 28.32 oz-in | 18.2 | 0.14 oz-in² | 0.531 lbs | 4 | Legacy |
| Z417-17-02 | NEMA 17 | 1.650 in | 0.9° | bipolar | 1.700 in | 1.4 AMP | 28.32 oz-in | 3.21 | 0.14 oz-in² | 0.531 lbs | 4 | Legacy |
| Z417-17-03 | NEMA 17 | 1.650 in | 0.9° | bipolar | 1.700 in | 1.1 AMP | 28.32 oz-in | 5.13 | 0.14 oz-in² | 0.531 lbs | 4 | Legacy |
| Z417-17-04 | NEMA 17 | 1.650 in | 0.9° | bipolar | 1.700 in | 0.7 AMP | 28.32 oz-in | 14 | 0.14 oz-in² | 0.531 lbs | 4 | Legacy |
Torque Curves
Speed
- Z417-11-03
- Z417-11-06
- Z417-11-09
- Z417-11-18
- Z417-17-01
- Z417-17-02
- Z417-17-03
- Z417-17-04
Find the motor that fits your Target Torque (oz-in) and Target Speed (RPM)
Dimensions
| Model | DIM. A (length) in MAX |
|---|---|
| Z417-11-03 | 1.100 in |
| Z417-11-06 | 1.100 in |
| Z417-11-09 | 1.100 in |
| Z417-11-18 | 1.100 in |
| Z417-17-01 | 1.700 in |
| Z417-17-02 | 1.700 in |
| Z417-17-03 | 1.700 in |
| Z417-17-04 | 1.700 in |

Operating Specifications
| Radial Play | 0.001 in @ 1 lbs |
| End Play | 0.003 in @ 3 lbs |
| Shaft Run Out | 0.002 TIR |
| Concentricity of Mounting Pilot to Shaft | 0.003 TIR |
| Perpendicularity of Mounting Pilot to Face | 0.003 TIR |
| Max Radial Load at Dimension "K" from mounting face | 6 lbs |
| Dimension "K" | 0.620 in |
| Max Axial Load | 6 lbs |
| Maximum Case Temperature | 176.00 °F maximum |
| Ambient Temperature | -4 °F to 122.00 °F |
| Storage Temperature * | -4 °F to 212.00 °F |
| Humidity Range (%) | 85% or less, non-condensing |
| Magnet Wire Insulation | Class B 130 deg C |
| Insulation Resistance | 100M Ohm at 500 VDC |
| Dielectric Strength | 500 VDC for 1 min |
* Do not operate the motor until its temperature has stabilized within the ambient operating range of -20°C to 50°C.
Legacy Product
While groundbreaking in performance and efficiency, this product is considered a Legacy Products. These motors were designed with a deep understanding of customer needs, powering advancements in robotics and automation through tailored solutions. These innovative products laid the foundation for our continued success, inspiring the development of our latest frameless and slotless motors. Lin Engineering remains committed to delivering cutting-edge solutions, staying true to the principles that drove the success of our legacy motors.
Features & Benefits
We've Reinvented the Step Motor
Conventional hybrid stepper motor utilizes a permanent magnet in the rotor. Our patented design uses a ring magnet in the stator instead. This drastically reduces the detent torque (unenergized drag torque) because the magnetic flux path is able to reach over the stator windings and go through only the outer edge of the rotor. Reducing detent torque improves accuracy, smooth operation and reduces noise. Best of all, modifying the magnet location does not change the dynamic torque.
These motors can be used in any application where dust, liquids, or corrosion is of concern. For instance: Aerospace applications, Medical and Laboratory equipment and ship industry, aircraft components

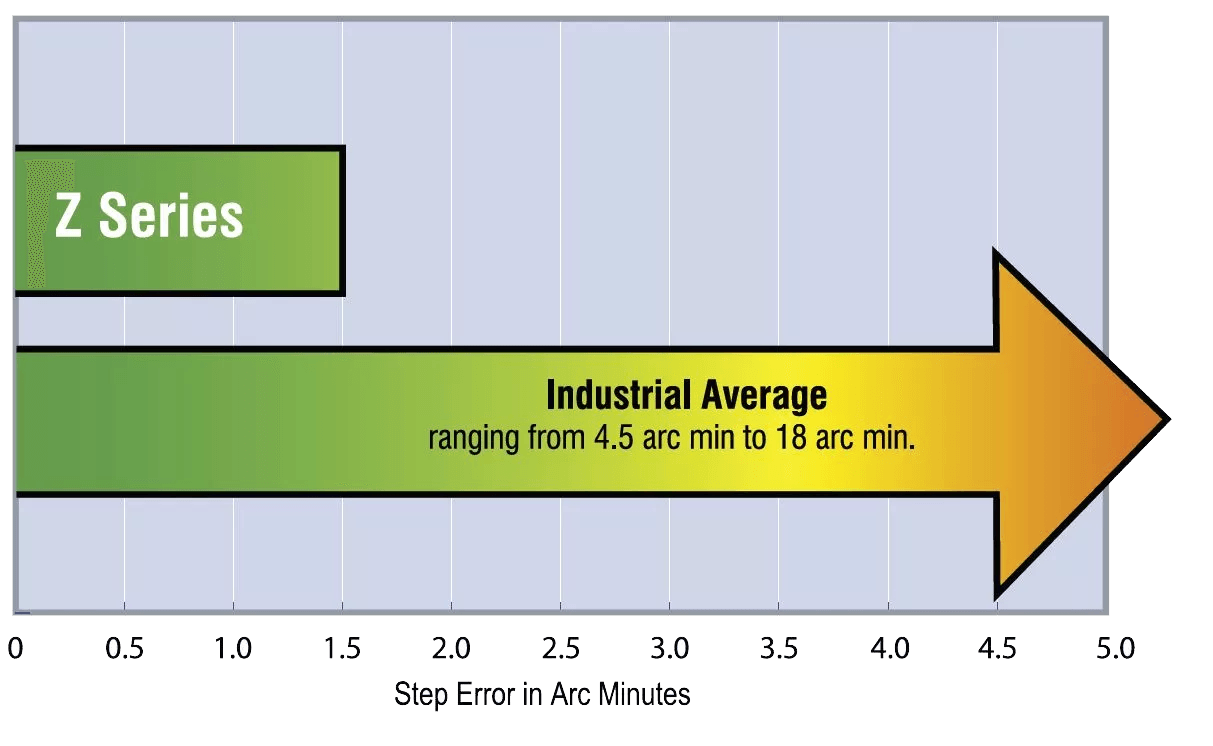
Extreme accuracy
Z-Series motor maintains ±1.5 arc minutes error under 64x microstepping. Industry average can range from ±4.5 to ±18 arc minutes in 0.9° step motors.
Quiet Operation
By eliminating detent torque, the motor operates substantially quieter than regular hybrid stepper motor.
Application
By Z-Series motors are perfect for any application which requires extreme precision, smoothness, and quiet operation.
Customizations & Optimizations
Lin Engineering can ensure that your hybrid stepper motor is optimized to deliver the required performance for your specific application, whether it’s increasing torque at a specific speed range, reducing noise or vibration, or optimizing for minimal power consumption, or making specific modification to ensure proper and native fit within your assembly.

Customization Services Include:
- Optimized Winding
- Multiple Shaft Options
- Customized Leads & Connectors
- Customized Housings & Mountings
- Bearings & Lubricants
- Mechatronic Solutions
- Environmental Protection
- Drivers & Controllers, Encoders, Gearboxes & Accessories
The result is that you’ll get a motor that is fully optimized for your specific applications and configured to seamlessly fit with your assembly. This reduces your product's complexity, and increases the speed and ease of the assembly of your final product.
Speak with one of our sales representatives about your specific application needs by filling out a request for a quote.



