Stepper Motor Medical Application Requirements

Stepper Motor Medical Application Requirements
When selecting a step motor for an application in the medical industry, many factors need to be considered. Although the requirements for step motors vary from application to application, some requirements should be generally considered as a rule of thumb. Whether the given application is a systolic pump or a Petrie dish, the following step motor characteristics should be evaluated:
• Small Package
• High Accuracy
• Smooth Motion
• Low Noise
• High Quality & Reliability
Small Package
In terms of size, step motor manufacturers adhere to various NEMA frame sizes. These sizes range from the miniature NEMA 8 to the massive NEMA 42. For most medical applications, space constraints are a critical issue to deal with, so the smaller amount of space the motors takes up, the better. Although there are some drawbacks to going with a smaller motor (i.e. less torque), this is the way to go in most applications. The NEMA 8 for example, measures a mere 0.79” square while the NEMA 34 measures 3.39” square.
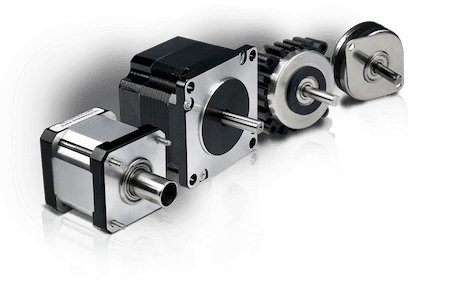
With many choices for the size of your step motor, one factor to keep in mind is that the NEMA frame size dimensions are an industry standard and cannot be easily altered. The length and thickness of the motor, however, can vary from manufacturer to manufacturer. For example, Lin Engineering’s 3609Z (Fig. 1) motors are a mere 0.47” thick. This 0.9° step motor is one of the thinnest motors in the industry.
If the application requires that the design be made to fit the motor, this same 3609 series steppers come in a round, or modular type of housing. Customers in the past have designed their own custom housing around this modular motor (fig. 2).
High Accuracy
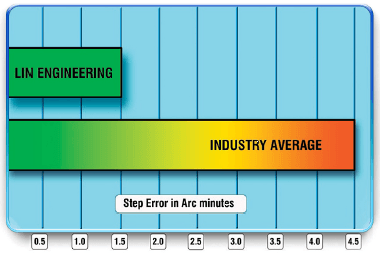
When the issue of accuracy is concerned, it’s safe to say that several medical applications require extremely high accuracy within the step motor. A Laser Eye Surgery machine would be in great danger if the motors and machinery weren’t accurate during a surgical process. Step motors rotate in terms of degrees. All step motors will have some form of step error. Therefore, it’s a matter of choosing one that has the least amount of error. Step error is measured in miniature increments of arc minutes, where, 1 arc minute equals 1/60°, or 0.0167°. The industry average error for a 0.9° step motor is 4.5 arc minutes, or, 0.075°. Lin Engineering’s 0.9° step motors have an average step error of 1.5 arc minutes, or, 0.025°.
Naturally, the finer the step resolution of the motor, the more accurate it is. Generally, step motor manufacturers offer 1.8° increment step motors, 0.9° and some have 0.45° increment step motors. Companies like Japan Servo have 0.45° step motors in a NEMA 17 package.
Accuracy lies in the design and manufacturing process of the step motor. One question to keep in mind for step motor manufacturers is to inquire about their six sigma process or how many defects per million parts they encounter during production (DPMO – Defects Per Million Opportunities).
Smooth Motion
Step motors are advantageous because they can stop at any location your program tells it to. But, as the name indicates, these motors take steps when moving. In order to move one revolution, the motor must take 200 steps for a 1.8° motor. Each step the mo2tor takes, it takes a few microseconds to settle in that new position, creating a slight oscillation. If these oscillations continue to add up with each step the motor takes, this can cause jittery and unsmooth motion.
In choosing a step motor, it is difficult to tell whether or not you have chosen a smooth operating motor. But there are ways to create an environment for the motor such that smooth motion is possible.
In most cases, motors are too powerful and will cause unsmooth motion. It is important to select a motor that has just the right amount of torque. Talking to an applications engineer will help eliminate the guesswork on choosing the right motor. If your chosen motor is indeed too powerful, decreasing the voltage or current will decrease torque. Dampers can be purchased and placed on the end shaft of a step motor in order to create more weight on the motor, thus, dampening the jittery motion.

Low Noise
Smooth motion and low noise come hand in hand. But, noise from a motor can be a result of a few factors. Mechanical noise can be caused by an imbalance of inductance or resistance readings from phase to phase. Step motors generally have two phases where electrical characteristics must match. Other times, noise can be caused by poor design and manufacturing of each component in the step motor.
Once again, looking for a manufacturer’s six sigma capabilities is key to getting good quality and long lasting step motors.
High Quality & Reliability
Medical applications run the risk of reliability in most situations. Therefore, searching for the right motor is not the only factor. Searching for the right motor manufacturer is just as important.
Many customers will request MTBF specifications (Mean Time Between Failure) to ensure that their potential motor will last a certain number of cycles. While these requests are reasonable, step motors are very robust under correct usage.
Generally, if a step motor is used under the correct load conditions (both axial and radial loads of the shaft), and if environmental conditions are within specifications, step motors will last a long time. The life of a step motor usually correlates with the life of the bearings within the motors, which can last as long as 20 years.
So, whether your application involves making intricate cuts within a human being’s eyes, pumping fluids, or any other type of medical application, taking a motor’s size, accuracy, smoothness of motion, noise level, quality, and reliability are a must.
News
Continue Reading

Selecting the Right Linear Actuator to Improve Operating Efficiency
Selecting the appropriate linear actuator can be quite the ordeal – and selecting the wrong one could dramatically reduce the efficiency of your application, and shorten its lifespan. Learn about the different types of linear actuators, how to select the right one, and which services can help make the decision as simple as 1-2-3!
Stepper Motor Semi Conductor Application Requirements
When selecting a step motor for a machine that is being used in the semi-conductor industry, there are many performance tradeoffs that need to be considered. Going with a small but accurate step motor will help keep the overall machine smaller, but torque might be an issue. On the other hand selecting a bigger, more powerful motor might not achieve the smooth and high accuracy performance that is demanded by these machines. No matter which motor is used, selecting one that meets the demands of the application is a must.