Motor Engineering and Manufacturing
 USA Based Manufacturing, Engineering, and Support
USA Based Manufacturing, Engineering, and Support- Two Week Prototype Turnaround
- Multiple Global Manufacturing Facilities
- Millions of Motors Shipped Annually
- ISO9001, AS9100D, TS16949 Certified
- OEM Motors Optimized For Your Application

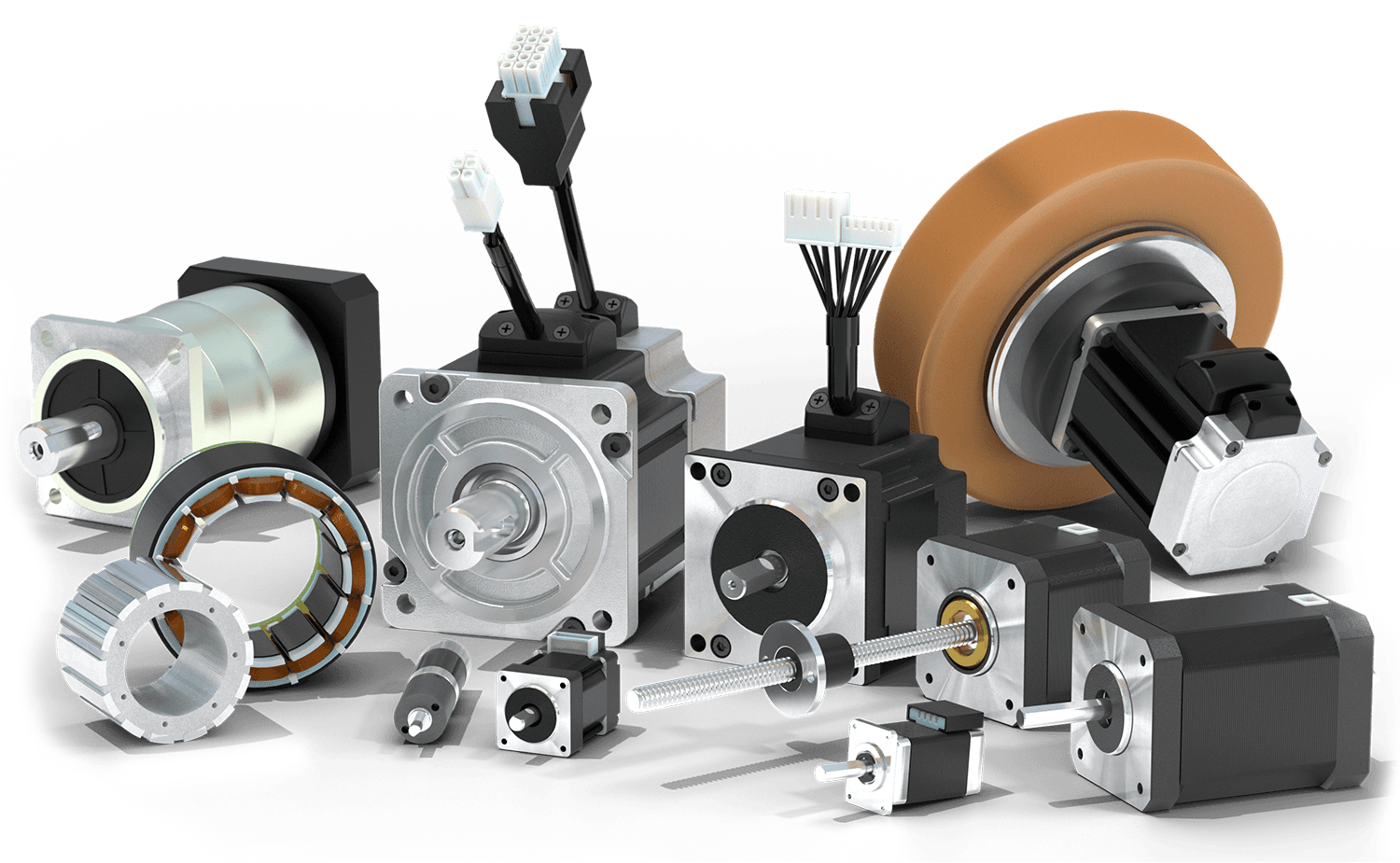


Choose The Right Product For Your Needs
We engineer and manufacture a variety of precision DC motors and motion control components. We have the capability, capacity, and expertise to supply a small batch or millions of highly optimized motors for your specific application. Lin Engineering can scale with your production needs.

USA Production Available

Global Footprint
Lin Engineering has a strong global footprint with 1.5 million square feet of manufacturing space across eight facilities, including additional locations in Europe and Asia. This extensive network enables scalable production, ensuring efficient delivery and support for customers worldwide.
Trusted by Aerospace. Certified to AS9100.
Lin Engineering is proudly AS9100D certified, meeting the rigorous quality standards required by the aerospace industry. Our certification reflects a deep commitment to process control, traceability, and risk management—ensuring the reliability and consistency you expect from a trusted manufacturing partner.
Built on a Foundation of Quality and Compliance
At Lin Engineering, certification and compliance are integral to how we operate. We adhere to both domestic and international standards—including ISO9001, AS9100, CE, REACH, Conflict Minerals, and RoHS—ensuring our products meet strict requirements for safety, reliability, and environmental responsibility. This commitment provides our customers with the confidence that every motor we deliver is built to perform and built to last.

